HU Robosub in competitions

The Robotics for Asset Maintenance and Inspection (RAMI) competition is an European event that focuses on advancing the capabilities of autonomous underwater vehicles in performing inspection and maintenance tasks. Universities from across Europe participate, pushing innovation in inspection and maintenance robotics.
 La Spezia, Italy
La Spezia, ItalyBuoy area inspection
One of the first tasks in the competition is to inspect the buoy area, which simulates an underwater oil leak. Our AUV must navigate to this zone, locate the buoys, and identify their colors to assess the situation. This task is crucial for mapping the environment and gathering the data needed for further action. Precision in navigation and object detection will determine the success of this mission.
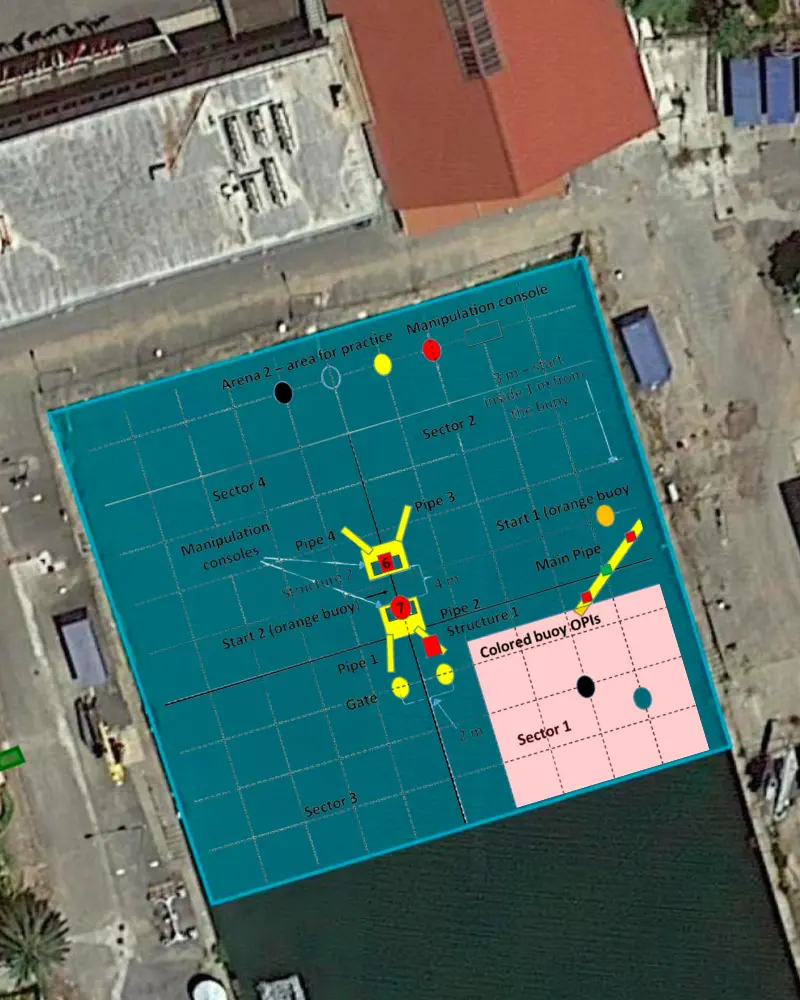
Pipeline number recognition
To understand the extent of the underwater damage, our AUV needs to inspect a pipeline structure and find a specific identification number. This number, placed on a damaged section, tells us exactly where intervention is needed. Successfully recognizing and reporting this marker requires advanced vision capabilities and stable maneuvering in unpredictable underwater conditions.

Gate passage & color identification
The final challenge combines navigation and perception as our AUV moves through a submerged gate: two yellow buoys positioned underwater. At the same time, it must detect and correctly identify a key color, proving its ability to react to the environment. Smooth movement through the gate and accurate color recognition are essential to completing this task efficiently.

Meet the team
This is the team taking on RAMI 2025. Driven, innovative, and ready to push the limits of underwater robotics!