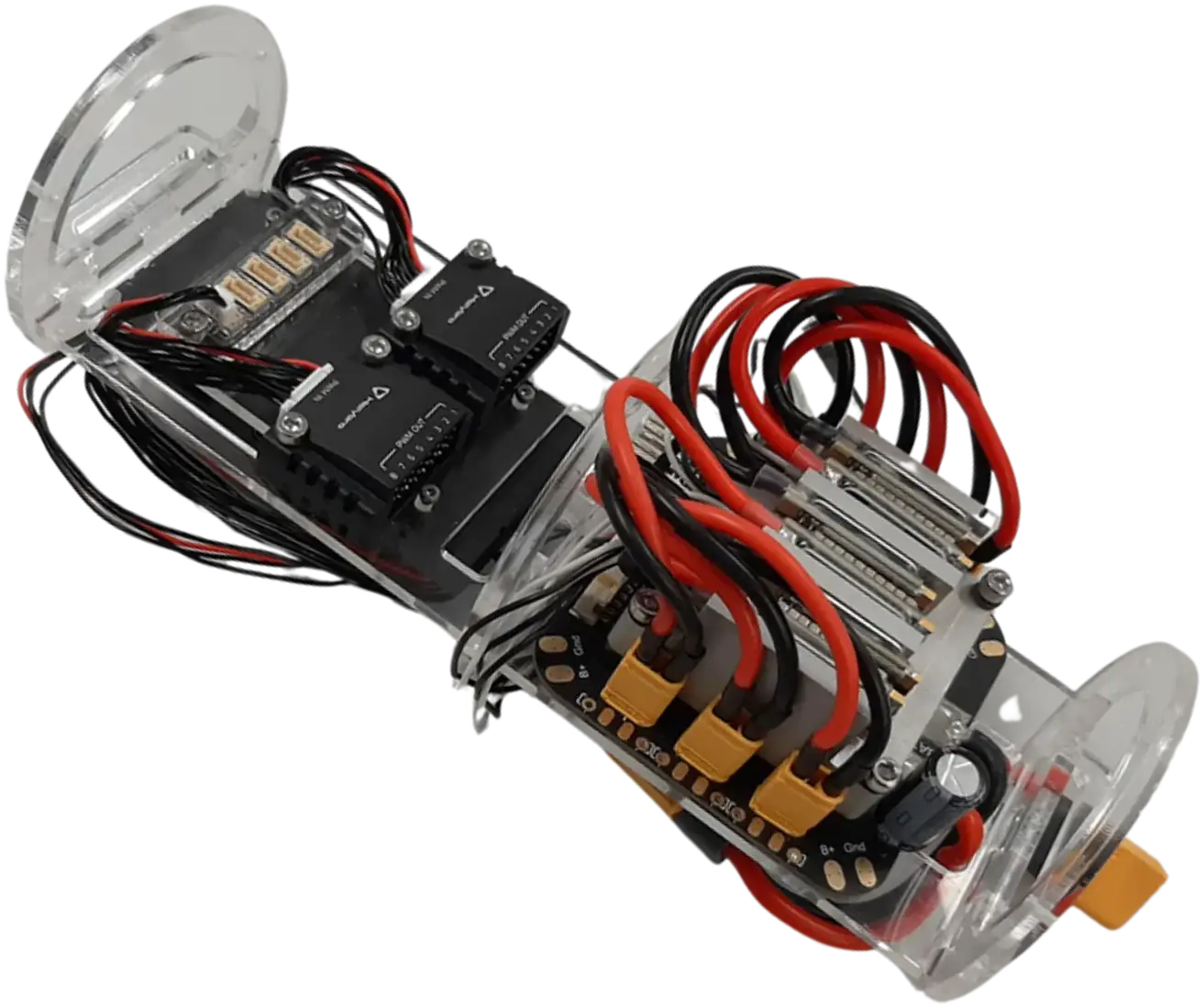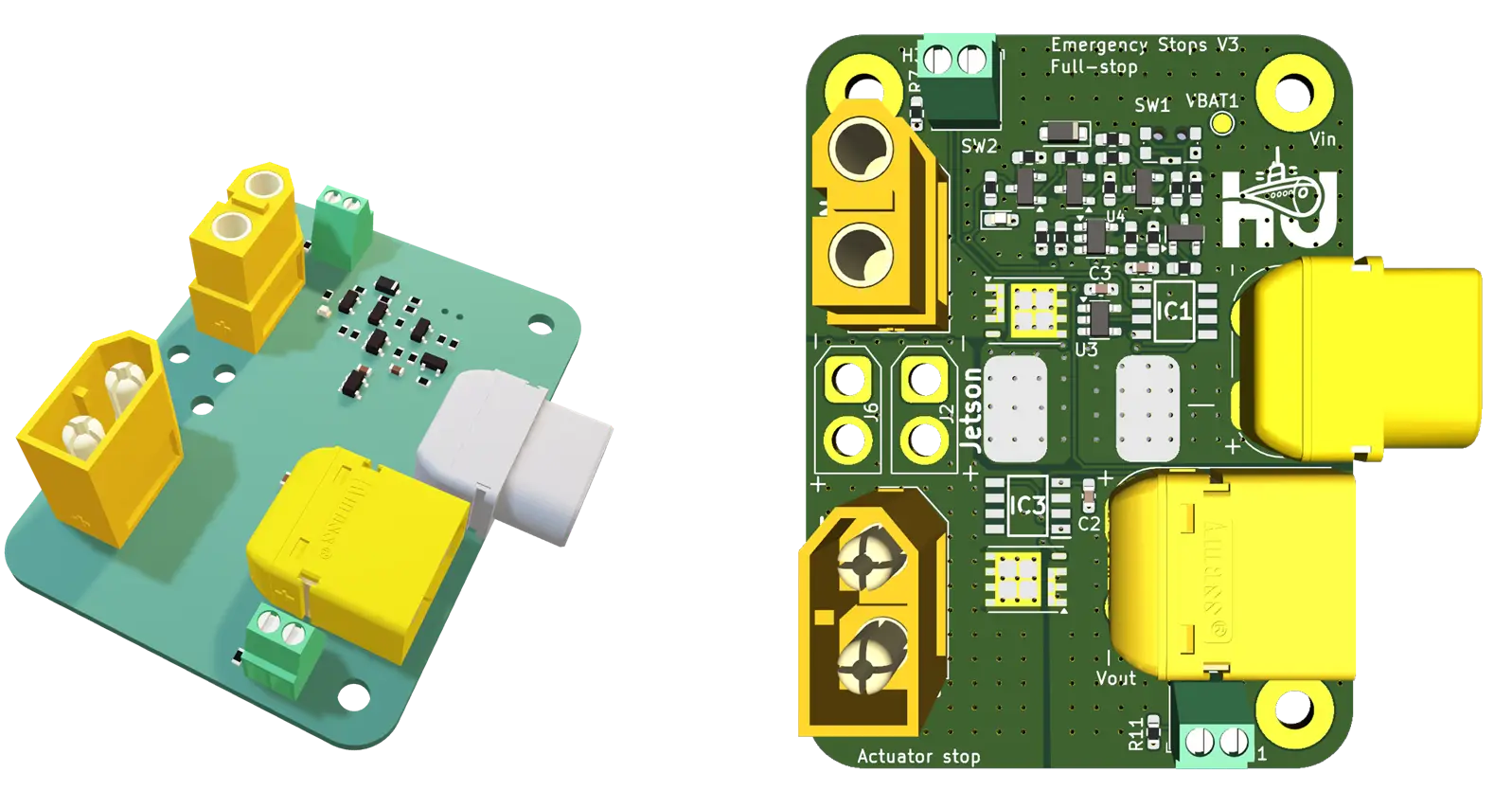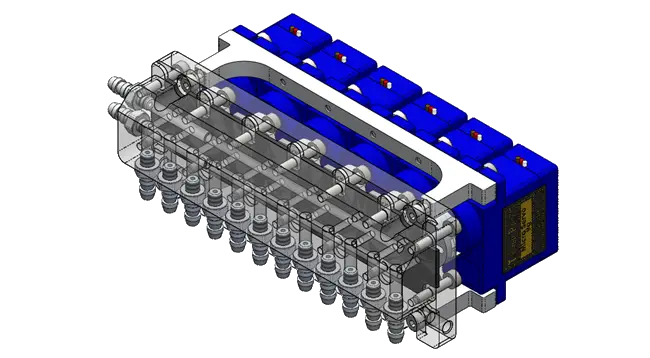

Hoofdregelsysteem
Voorzien van een robuuste hoofdregelmodule.
Aangestuurd door de Pixhawk 6C voor nauwkeurige operaties.
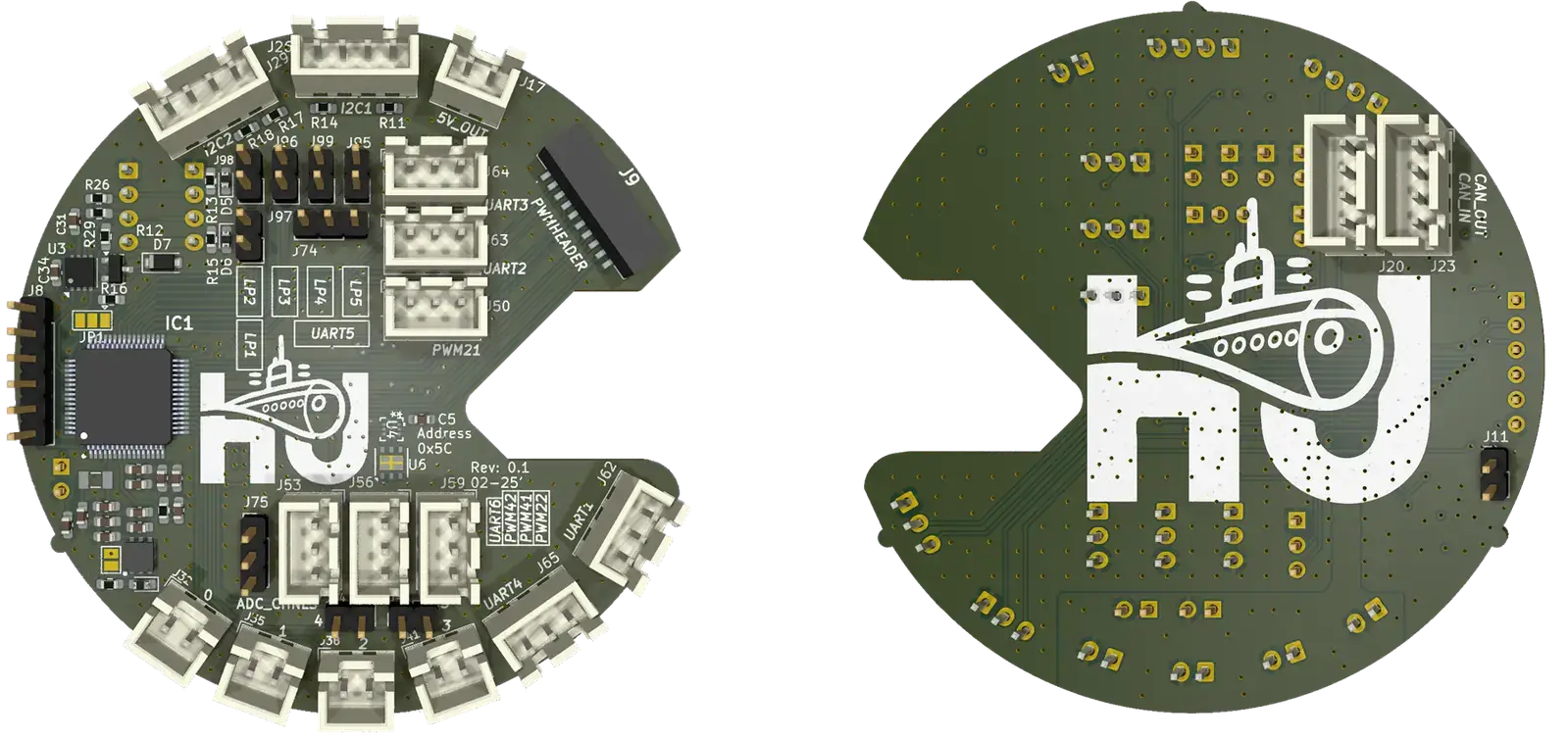
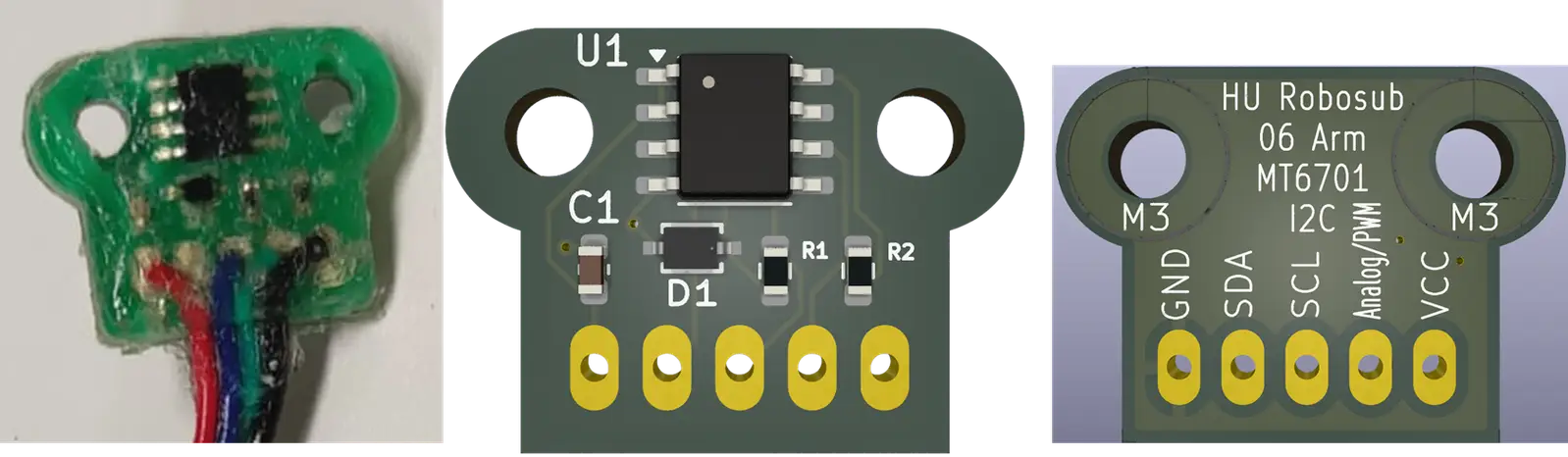
Ondersteunt meerdere communicatieprotocollen, waaronder 40 MHz, I2C, PWM, en meer.
Zorgt voor een nauwkeurige aansturing van de thrusters en de bewegingscontrole.