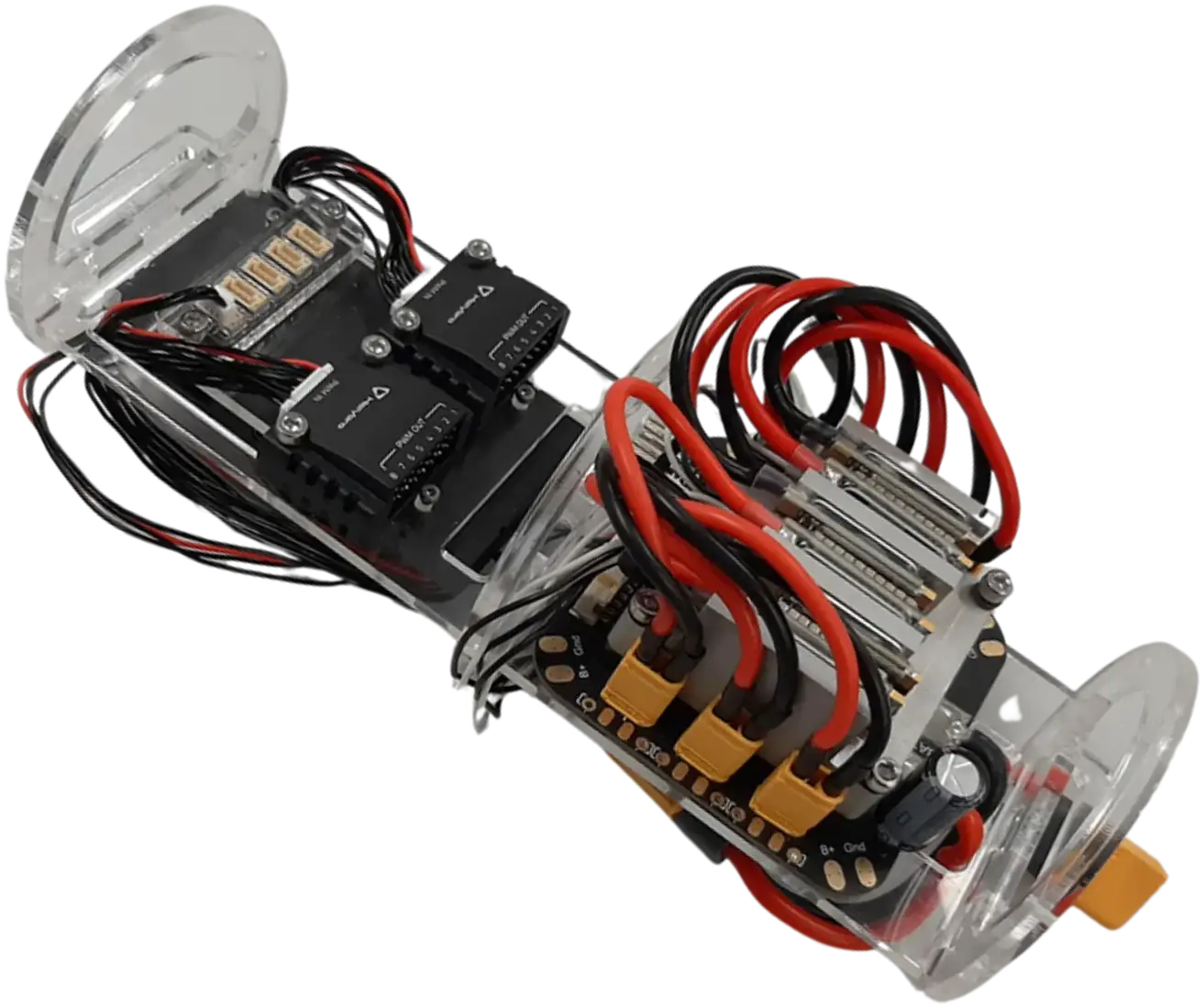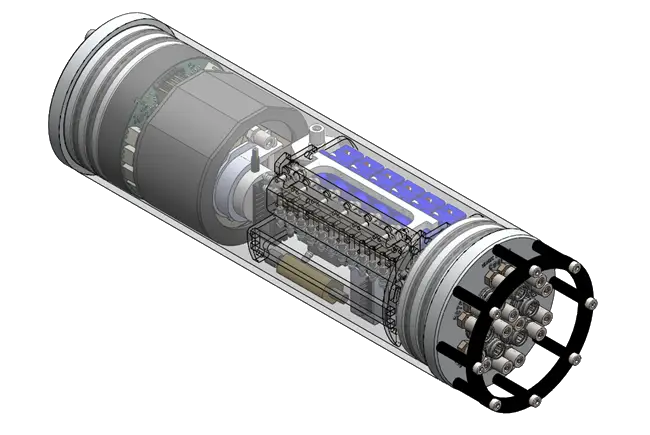

Main control system
Features a robust main control module.
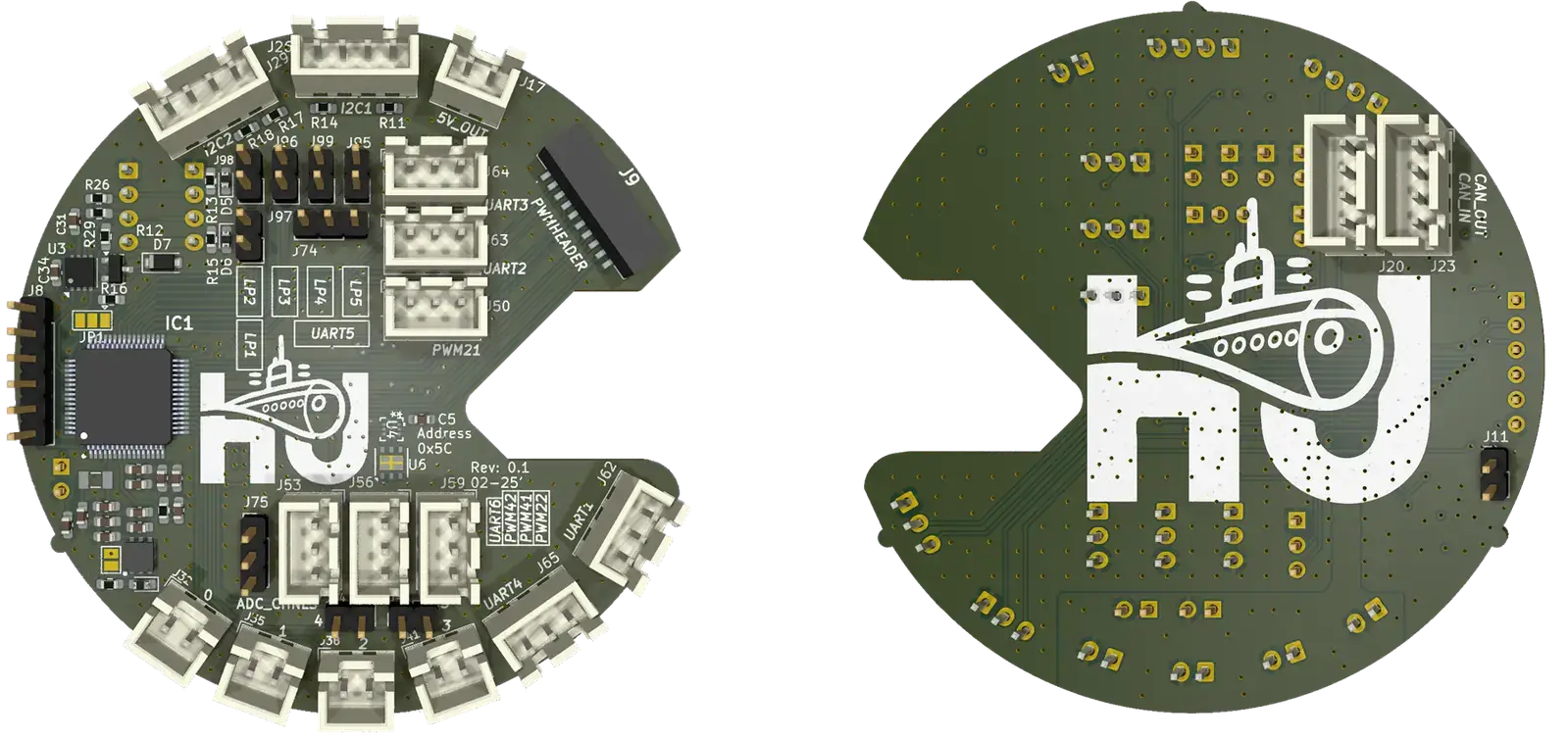
Powered by the Pixhawk 6C for precise operations.
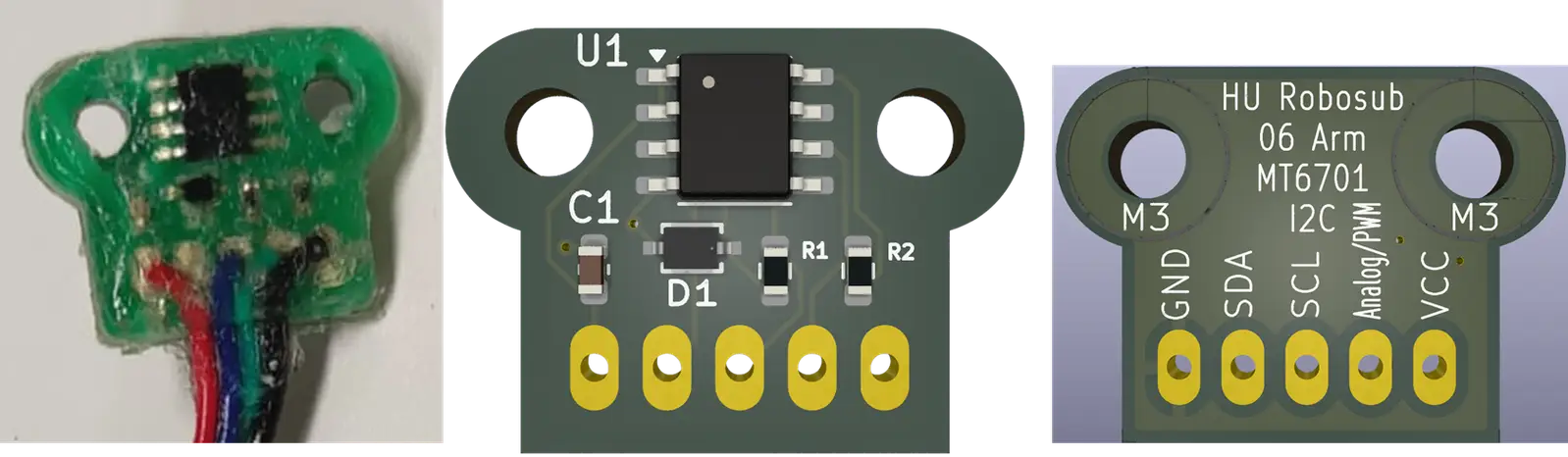
Supports multiple communication protocols, including 40 MHz, I2C, PWM, and more.
Handles thruster management and motion control with precision.